

Price: $39.99 - $49.99
(as of Jan 03,2026 00:53:46 UTC – Details)
Buy Now
From the Publisher

Introduction to ROS 2
Lay the foundation for advanced robotics development
Understand the architecture and communication layers of ROS 2Learn about DDS (Data Distribution Service) and core ROS 2 toolsGet set up with ROS 2 Jazzy on your development system

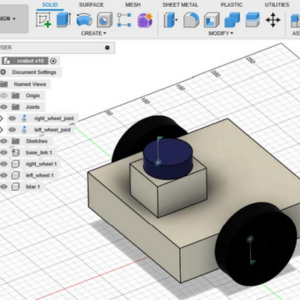
Simulating Robots in a Realistic Environment
Bridge the gap between code and physical hardware using simulation
Use the latest Gazebo Sim for robot testingSimulate robotic environments and behavior before deploymentIntegrate sensors, physics, and dynamic models for real-world fidelity
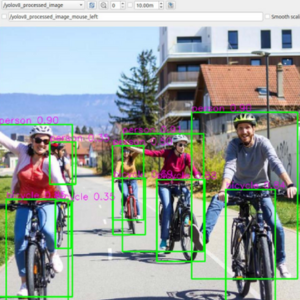
Working with ROS 2 and Perception Stack
Utilize OpenCV and PCL libraries for image and 3D data processing
Interface vision systems using USB webcams and RealSense depth sensorsAccelerate vision tasks with GPU-based processing and machine learningApply object detection and classification using NVIDIA ROS ISAAC and YOLOv8
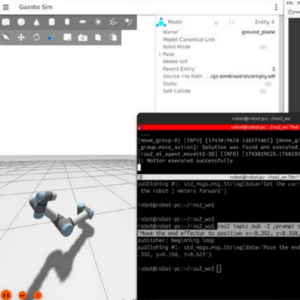
Interfacing Large Language Models with ROS 2
Enhance Robot Intelligence with LLMs and AI Agents in ROS 2
Integrate Large Language Models (LLMs), Vision-Language Models (VLMs), and Action-Language Models (ALMs) for intelligent robotic controlExplore real-world ROS 2 AI agent applications with turtlesim, Nav2, MoveIt2, and advanced projects like ROSA, RAI, and ROS-LLM

Deploying an RL model in the Spot robot from Boston Dynamics
Master DRL workflows in simulation with cutting-edge tools
Learn reinforcement learning fundamentals and how agents optimize behavior through environment interactionSet up Isaac Lab on Ubuntu 24.04 using Docker to train robotic policies in simulationTrain a variety of robots—including UR-10, AnyMal, and H1 humanoid—using GPU-accelerated DRL algorithms

ROS 2 and Deep Reinforcement Learning
Bridge the gap between simulation and physical robot deployment
Convert simulated training results into deployable models for physical robots using ROS 2Implement task-specific DRL workflows with Gymnasium integration and Isaac Sim physicsExplore real-world deployment with a case study: transferring a locomotion model to Boston Dynamics’ Spot robot
Add to Cart
Add to Cart
Add to Cart
Add to Cart
Customer Reviews
4.6 out of 5 stars 16
4.9 out of 5 stars 24
—
4.0 out of 5 stars 17
Price
$49.99$49.99 $44.99$44.99 $39.99$39.99 $32.34$32.34
Audience
Experienced ROS users and robotics professionals looking to deepen their skills in ROS 2. Beginners and hobbyists who want a hands-on, beginner-friendly introduction to ROS 2. Programmers and enthusiasts of all levels aiming to build AI-driven robots using Python. Robotics engineers and researchers applying AI/ML to advanced robotic systems with solid technical backgrounds.
Skill Level
Intermediate to Advanced Beginner to Intermediate Beginner to Advanced Advanced
Prerequisites
ROS basics, GNU/Linux, C++, Python Basic Linux CLI, Python (C++ optional) Python basics helpful Python, AI/ML concepts, electronics, Linux CLI, single-board computers
Learning Outcomes
Advanced ROS 2 concepts, robot simulation with Gazebo, Nav2, MoveIt 2, perception, control, real hardware builds (Raspberry Pi), LLM agents, RL apps ROS 2 fundamentals, nodes, interfaces, URDF modeling, visualization with RViz, Gazebo integration, TF management Practical robotics with sensors, dashboards, OpenCV, Vosk voice control, encoder-based localization, automation scripts, performance algorithms AI/ML in robotics, path planning, decision trees, object recognition, NLP, genetic algorithms, personality simulation, obstacle avoidance
Key Differentiators
Combines cutting-edge ROS 2 techniques with AI agents and reinforcement learning in real robots. The ultimate beginner’s guide for building a strong ROS 2 foundation with hands-on simulation. Focused on real-world robot control, computer vision, and sensor integration using Python. Brings AI to the forefront—perfect for integrating ML, NLP, and intelligence into your robots.
Publisher : Packt Publishing
Publication date : July 28, 2025
Edition : 4th ed.
Language : English
Print length : 576 pages
ISBN-10 : 1836209010
ISBN-13 : 978-1836209010
Item Weight : 2.15 pounds
Dimensions : 7.5 x 1.3 x 9.25 inches
Best Sellers Rank: #171,004 in Books (See Top 100 in Books) #11 in Computer Operating Systems Theory #33 in C++ Programming Language #63 in Human-Computer Interaction (Books)
Customer Reviews: 4.6 4.6 out of 5 stars (16) var dpAcrHasRegisteredArcLinkClickAction; P.when(‘A’, ‘ready’).execute(function(A) if (dpAcrHasRegisteredArcLinkClickAction !== true) dpAcrHasRegisteredArcLinkClickAction = true; A.declarative( ‘acrLink-click-metrics’, ‘click’, “allowLinkDefault”: true , function (event) if (window.ue) ue.count(“acrLinkClickCount”, (ue.count(“acrLinkClickCount”) ); ); P.when(‘A’, ‘cf’).execute(function(A) A.declarative(‘acrStarsLink-click-metrics’, ‘click’, “allowLinkDefault” : true , function(event) if(window.ue) ); );
Buy Now